
В процессе биологической эволюции возникли чрезвычайно сложные и вместе с тем удивительно эффективно функционирующие живые организмы. Эффективность, гармоничность и согласованность работы “компонент” живых существ обеспечивается биологическими управляющими системами. Но каковы эти системы управления? Насколько мы можем понять их? Насколько мы можем воплотить этот естественный “интеллект”, изобретенный Природой, в практически нужные для человека интеллектуальные системы управления? Какие исследования нужно провести, чтобы разобраться во всем многообразии естественных “интеллектуальных” систем управления? Какие есть подходы к таким исследованиям? Какие концептуальные теории можно положить в основу исследований биологических систем управления? Какие исследования уже проведены, и что можно ожидать в ближайшем будущем? Могут ли исследования “интеллектуальных” изобретений биологической эволюции служить естественнонаучной основой построения искусственных интеллектуальных систем? Какие новые технологии могут возникнуть на основе этих исследований? Какие философские вопросы затрагивают такие исследования? Каково может быть влияние изучения и создания интеллектуальных систем управления на будущее развития человечества?
В процессе биологической эволюции возникли чрезвычайно сложные и вместе с тем удивительно эффективно функционирующие живые организмы. Эффективность, гармоничность и согласованность работы “компонент” живых существ обеспечивается биологическими управляющими системами.
Но каковы эти системы управления? Насколько мы можем понять их? Насколько мы можем воплотить этот естественный “интеллект”, изобретенный Природой, в практически нужные для человека интеллектуальные системы управления? Какие исследования нужно провести, чтобы разобраться во всем многообразии естественных “интеллектуальных” систем управления? Какие есть подходы к таким исследованиям? Какие концептуальные теории можно положить в основу исследований биологических систем управления? Какие исследования уже проведены, и что можно ожидать в ближайшем будущем? Могут ли исследования “интеллектуальных” изобретений биологической эволюции служить естественнонаучной основой построения искусственных интеллектуальных систем? Какие новые технологии могут возникнуть на основе этих исследований? Какие философские вопросы затрагивают такие исследования? Каково может быть влияние изучения и создания интеллектуальных систем управления на будущее развития человечества?
Наверно, перечень этих интригующих вопросов может быть продолжен и, возможно, необходим не один круглый стол (КС) для их детального обсуждения. На этом КС предполагается обсудить только некоторые “срезы” проблем интеллектуального управления. Список вынесенных на КС вопросов был обусловлен в основном научными интересами инициаторов КС (В.Г. Редько, А.И. Самарин, Ю.В. Тюменцев). Тем не менее, этот список “не догма” — мы будем только приветствовать включение дискуссию близких к предложенным вопросов. Важно только, чтобы обсуждение было максимально содержательным, интересным и конструктивным. Ниже приводится “затравка” по каждому из вынесенных на КС вопросов.
Для удобства чтения перечислим здесь еще раз эти вопросы.
- Теория функциональных систем П.К. Анохина как концептуальная основа построения интеллектуальных систем управления.
- Эволюция когнитивных способностей животных и проблемы интеллектуального управления.
- From Animal to Animat — моделирование адаптивного поведения животного и робота.
- Интеллектуальное управление и проблема Всемирного мозга.
1. Теория функциональных систем П.К. Анохина как концептуальная основа построения интеллектуальных систем управления
Как исследование, так и создание интеллектуальных систем управления целесообразно проводить, отталкиваясь от общих концептуальных теорий и схем. Одной из таких общих концепций является теория функциональных систем, разработанная в 1930-70-х годах советским нейрофизиологом П.К. Анохиным [1].
Функциональная система по П.К. Анохину – кибернетическая схема управления, нацеленного на достижение полезных для организма результатов. Опишем наиболее общие особенности функциональной системы в виде схемы управления поведением животного, характеризуя основные ее свойства, и переводя – там, где это естественно – биологические представления на кибернетический язык.
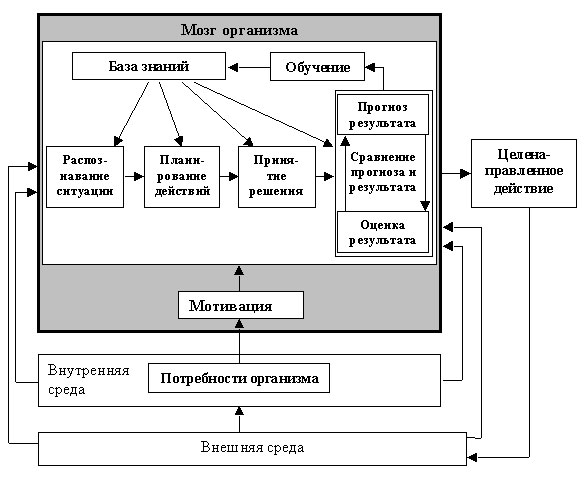
Рис. 1. Кибернетическая схема функциональной системы (в духе П.К. Анохина).
Функциональная система характеризует следующие свойства схемы управления поведением животного (рис. 1):
- целенаправленность, связанную с необходимостью удовлетворения потребностей животного;
- мотивацию, задающую предпосылки (например, обусловленные потребностями) для формирования цели;
- доминанту по А.А. Ухтомскому, обеспечивающую мобилизацию ресурсов животного на достижение приоритетной цели, в том числе мобилизацию интеллектуальных ресурсов (концентрацию внимания);
- распознавание ситуации;
- «планирование» действий;
- принятие решения;
- прогноз результата действия;
- выполнение самого целенаправленного действия;
- оценку результата действия;
- сопоставление прогноза и результата;
- поиск нужного решения и корректировку базы знаний (в случае рассогласования прогноза и результата) – обучение.
Распознавание, планирование, принятие решения основываются на использовании базы знаний, которая пополняется при обучении.
Важное понятие функциональной системы – мотивация. Роль мотивации – формирование цели и поддержка целенаправленных форм поведения. Мотивация может рассматриваться как активная движущая сила, которая стимулирует нахождение такого решения, которое адекватно потребностям животного в рассматриваемой ситуации. Мотивация тесно связана с понятием доминанты, которое ввел А.А. Ухтомский. Доминанта мобилизует ресурсы животного на достижение заданной цели. В частности, мобилизуются нервные ресурсы, так что внимание животного концентрируется на приоритетной цели. Отметим интересные модели доминанты, которые разрабатывает В.И. Крюков [2].
Перечисленные свойства характеризуют общую схему системы управления поведением животного. Следует подчеркнуть, что есть большой потенциал для глубокого развития этой схемы. Здесь можно исследовать 1) структуры памяти (постоянной, долговременной, кратковременной) в базе данных, 2) специфику процедур обучения, 3) программы поведения животных, основанные на базе знаний, 4) «логику умозаключений» животных, используемую ими при планировании, прогнозе, коррекции и пополнении базы знаний и т.д.
Отметим, что хотя эта схема была изначально введена как общая схема систем управления поведением животных, но она вполне может служить концептуальной основой для построения различных прикладных систем управления. Т.е. в определенном смысле эту схему можно рассматривать общую структуру довольно широкого класса систем управления на самых разных уровнях – систем управления роботами, промышленными предприятиями, регионами, государствами, человечеством.
Необходимо отметить, что есть развитие теории П.К. Анохина. Не претендуя на полноту, здесь только отметим работы К.В. Судакова с сотр. по развитию теории функциональных систем [3], и интересную попытку Е.А. Умрюхина построения модели мозга на основе теории Анохина-Судакова [4].
Необходимо также подчеркнуть, что теория функциональных систем П.К. Анохина – не единственная концептуальная проработка общих схем “интеллектуальных” систем управления.
Опять таки далеко претендуя на полноту, отметим некоторые концептуальные работы и модели:
- Теория ситуационного управления (Д.А. Поспелов с сотр.) [5]
- Теория перцептивного контроля В.Пауэрса [6,7]
- Модель концептуальной рефлекторной дуги Е.Н. Соколова [8]
- Схемы “интеллектуальных” систем распознавания, разработанных Д.С. Чернавским с сотр. [9]
- Концепция и модели автономного адаптивного управления А.А. Жданова [10]
- Модели адаптивного критического контроля (П. Вербос, В. Ванч, Д. Прохоров) [11,12]
Интересно отметить, что часто ключевые моменты функциональных систем П.К. Анохина некоторыми авторами переоткрываются заново. Например, некоторые схемы управления, которые вводит В.Ф. Турчин в книге “Феномен науки” [13], напоминают схемы П.К. Анохина (в данном случае необходимо заметить, что “Феномен науки” был написан в конце 60-х годов, когда только начали издаваться основные книги П.К. Анохина). Известный международный проект Principia Cybernetica [14] кладет в основу анализа систем управления теорию перцептивного контроля В.Пауэрса и “не замечает” теории функциональных систем П.К. Анохина. О теории В. Пауерса в контексте проекта Principia Cybernetica можно прочитать в Интернет-статье Ф. Хейлигхена “Мировой Суперорганизм: эволюционно-кибернетическая модель возникновения сетевого сообщества” [15].
По-видимому, для полноценного осмысления роли теории функциональных систем П.К. Анохина и аналогичных концептуальных теорий как основы исследования и построения интеллектуальных систем управления необходим глубокий аналитический обзор таких теорий, в котором было бы проведено сопоставление схем, моделей и концепций, предложенных разными авторами.
2. Эволюция когнитивных способностей животных и проблемы интеллектуального управления
Естественный интеллект произошел в результате биологической эволюции. Но как происходил процесс формирования и совершенствования когнитивных, «интеллектуальных» способностей животных? Каковы основные стадии эволюции познавательных свойств? Как эволюция когнитивных способностей животных привела к возникновению интеллекта человека? Как подойти к изучению «интеллектуальных изобретений» биологической эволюции?
Необходимо подчеркнуть, что исследование эволюции происхождения интеллекта чрезвычайно важно с гносеологической точки зрения [16, 17]. А именно, существует глубокая гносеологическая проблема: почему мышление, интеллект, логика человека применимы в познании природы? Действительно, с одной стороны, познавательные мыслительные процессы, которые использует ученый в научном исследовании природы, происходят в нашем, человеческом сознании, с другой стороны, процессы, которые мы познаем посредством мышления, относятся к изучаемой нами природе. Эти два типа процессов различны. Поэтому далеко не очевидно, что мы можем использовать процессы первого типа для познания процессов второго типа.
Например, далеко не очевидно, что теоремы, которые доказывает математик (используя чисто умозрительные процессы своего мышления), могут быть применимы физиком к исследованию процессов в реальном мире. Т.е. возникает сомнение в самой строгой из научных дисциплин – математике.
И более того, это сомнение касается обоснования всего научного познания, поскольку мы задаемся вопросом о принципиальной применимости человеческого мышления к познанию природы.
Как же мы могли бы подойти к решению этой гносеологической проблемы?
Действуя упрощенно, мы, конечно, можем попытаться разрешить данную проблему следующим образом. В процессе биологической эволюции животные приобретали способности познавать внешний мир. Эти познавательные способности использовались в системах управления поведением животных, помогали животным предвидеть события во внешнем мире и, тем самым, приспосабливаться к окружающей среде. Приспособленности тех животных, которые приобретали «хорошие» познавательные способности, увеличивались. Животные с повышенными приспособленностями распространялись в популяциях, следовательно «хорошие» познавательные способности фиксировались эволюцией. Шаг за шагом, эволюционно возникали все более сложные и более интеллектуальные способности, что, в конечном итоге, привело к появлению человеческого мышления, интеллекта человека. Таким образом, интеллект человека сформировался в процессе длительной эволюции совершенствования познавательных способностей животных, и не удивительно, что он может быть применен для познания событий во внешнем мире.
Но этих простых рассуждений явно недостаточно. Проблема принципиальной способности познавать природу – фундаментальная гносеологическая проблема, и она должна быть проанализирована настолько глубоко, насколько это возможно.
Более того, возможно, что в современной науке и нет более фундаментальной проблемы, и именно исследования, направленные на решение проблемы эволюционного происхождения интеллекта и задачи обоснования применимости интеллекта человека к познанию природы, могли бы внести наибольший вклад в научное миропонимание в ближайшие десятилетия (об этом см. также [18]).
Итак, еще раз задумаемся над вопросом – как же подойти к проблеме обоснования применимости человеческого мышления в научном познании?
По-видимому, наиболее естественный подход – постараться тщательно исследовать эволюцию познавательных способностей животных и постараться осмыслить, как и почему в этом процессе появлялись «интеллектуальные» способности, обеспечивающие познание внешнего мира, познание природы. Такие исследования могли бы включать в себя математические и компьютерные модели наиболее важных «интеллектуальных изобретений» биологической эволюции, посредством которых животные «познают» закономерности во внешнем мире, а также модели эволюционных переходов между «интеллектуальными изобретениями» разных уровней.
Надежнее всего начать с «самого начала» – с происхождения жизни – и проследить весь путь биологической эволюции от простейших до человека, выделяя на этом пути наиболее важные эволюционные «изобретения», ведущие к мышлению, логике, интеллекту.
Какие здесь уже есть заделы? Какие есть эволюционные концепции, какие уже известные модели могли бы быть полезными для теоретических исследований «интеллектуальных изобретений» биологической эволюции?
Не претендуя на полноту, кратко охарактеризуем две эволюционные концепции: анализ эволюции высшей нервной деятельности Л.Г. Воронина [19] и теорию метасистемных переходов В.Ф. Турчина [13, 20].
Уровни эволюции высшей нервной деятельности по Л.Г. Воронину
В книге “Эволюция высшей нервной деятельности (очерки)” [19] Л.Г. Воронин выделяет следующие уровни индивидуального приспособления (рис.2):
- привыкание
- сенсибилизация
- нестойкая условная связь
- стабильная условная связь
- комбинационная условная связь
- абстрактно-логическая условная связь

Рис 2. Схема уровней высшей нервной деятельности по Л.Г. Воронину [19]. 1, 2 – несигнальные формы приспособления (привыкание и сенсибилизация ); 3 и 4 — нестойкая и стабильная условная связь; 5 — комбинационная условная связь, 6 — абстрактно-логическая условная связь.
Для удобства читателя поясним некоторые термины.
Привыкание (или угасание) – постепенное уменьшение реакции на многократно повторяющийся нейтральный стимул.
Сенсибилизация (или суммация) “ …основана на повышении чувствительности возбудимых структур в результате суммирования следов возбуждения с наличным возбуждением. Вследствие такого суммирования организм становится чувствительным к раздражениям, бывшим до этого подпороговыми. Приобретаемое таким образом свойство организма реагировать на индифферентный раздражитель напоминает условный рефлекс. Однако он не самовосстанавливается после угасания, его называют псевдоусловным рефлексом” [19].
“Комбинационная условная связь – это механизм тех систем реакций, которые возникают как бы без предварительной обработки, в результате комбинации ранее образовавшихся связей, хранящихся в памяти, и связей, вновь образующихся” [19].
Нижние два уровня (привыкание и сенсибилизация) — несигнальные формы индивидуального приспособления. Более высокие уровни – сигнальные формы.
Схема на рис. 2 отражает тот факт, что новые (верхние) уровни приспособления не полностью вытесняют старые, а существуют наряду со старыми.
Основываясь на анализе, выполненном Л.Г.Ворониным, и несколько огрубляя общую картину, можно выделить следующие уровни «интеллектуальных изобретений» биологической эволюции.
- Уровень первый – организм различает состояние среды, память об этих состояниях записана в геноме и передается по наследству, организм адекватно использует различие сред, меняя свое поведение с изменением среды. Пример этого уровня – свойство регулирования синтеза белков живой клеткой в ответ на изменение питательных веществ во внешней среде. Например, бактерия кишечной палочки обычно питается глюкозой, но если нет глюкозы, а есть лактоза, то в бактерии включается синтез специальных ферментов, перерабатывающих лактозу в глюкозу, что и обеспечивает жизнь бактерии в лактозной среде. Описанное свойство – это фактически безусловный рефлекс на молекулярно-генетическом уровне.
- Второй уровень – временное запоминание организмом состояния среды и адекватное (также временное) приспособление к среде. Пример этого уровня – привыкание. Этот простейший приобретаемый навык появляется на уровне сложных одноклеточных организмов. Память о состояниях внешней среды, формируемая при привыкании, кратковременная.
- Третий уровень – запоминание устойчивых связей между событиями в окружающей организм природе. Пример – классический условный рефлекс, в котором происходит долговременное запоминание связи между условным и безусловным стимулами. Скажем, собака запоминает связь между звуковым сигналом (условный стимул) и пищей (безусловный стимул). Память о связи между условным и безусловным стимулами долговременная: УР сохраняется в течение многих недель у низших позвоночных и до нескольких лет, а, может быть, и всю жизнь у высших животных. Характерное свойство классического УР – самовосстановление, наступающее через несколько десятков минут или часов после угасания. Появляется классический условный рефлекс примерно на уровне моллюсков.
Между классическим условным рефлексом и логикой, мышлением лежит целый ряд промежуточных уровней. Здесь мы только упомянем некоторые из них.
Инструментальный условный рефлекс отличается от классического тем, что здесь для получения поощрения животному необходимо совершить заранее неизвестное ему действие.
Цепь условных рефлексов – система реакций, формирующаяся на основе ранее хранившихся в памяти животного условных связей.
Начиная с некоторого уровня, у животных возможно формирование моделей внешнего мира [13].
Итак, можно выделить несколько ключевых «изобретений» и расположить их в последовательный ряд эволюционных достижений (рис. 3). В этом ряду происходит постепенное усовершенствование «познания» закономерностей в окружающей среде.
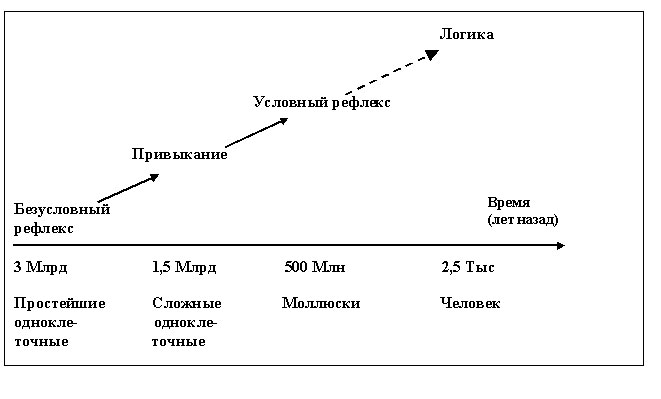
Рис.3. «Интеллектуальные изобретения» биологической эволюции.
«Авторы изобретений» и «даты приоритетов» представлены довольно условно.
Более подробное обсуждение схемы, представленной на рис.3, содержится в работе [16] (Лекция 15).
Концептуальная теория метасистемных переходов В.Ф.Турчина
Анализ эволюции высшей нервной деятельности, проведенный Л.Г. Ворониным, фактически констатирует этапы эволюции, и не исследует вопрос: как происходил процесс возникновения новых познавательных свойств биологических организмов, новых систем управления биологическими организмами? Попытка мысленно представить механизмы эволюционного прогресса биологических систем управления была сделана В.Ф. Турчиным [13].
В качестве основы исследования В.Ф. Турчин использует предложенную им «теорию метасистемных переходов» [13,20].
Кратко суть теории метасистемных переходов сводится к следующему: переход от нижних уровней системной иерархии к верхним происходит путем метасистемных переходов. Каждый метасистемный переход можно рассматривать как объединение ряда подсистем Si нижнего уровня и появление дополнительного механизма управления C объединенными подсистемами. В результате метасистемного перехода формируется система S’ нового уровня (S’ = C + S i Si), которая может быть включена как подсистема в следующий метасистемный переход (рис.4).
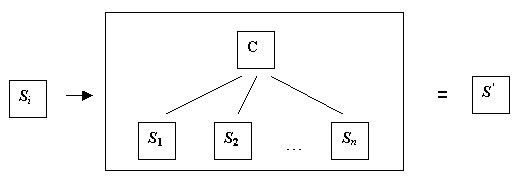
Рис. 4. Схема метасистемного перехода. Si — системы нижнего уровня,
C — управление объединенными подсистемами, S’ — система нового уровня иерархии.
В.Ф. Турчин рассматривает метасистемный переход как некий кибернетический аналог физического фазового перехода. Он уделяет особое внимание количественному накоплению «потенциала развития» в подсистемах Si перед метасистемным переходом на качественно новый уровень иерархии, а также процессу размножения и развития подсистем предпоследнего уровня иерархии после метасистемного перехода.
Отметим, что понятие метасистемного перехода хорошо соответствует интуитивному представлению об эволюционном прогрессе кибернетических систем. Действительно, если есть некая кибернетическая система (скажем, блок генов, блок нервной системы, блок компьютерной программы) S1, то несложно представить процесс дублирования такой системы. В результате дублирования возможно возникновение множества сходных систем: S1 —> {S1 , S2 , … , Sn } ={Si }. Системы Si могут быть сходными, но не идентичными, так как они сами могут модифицироваться за счет случайных процессов, скажем, мутаций. Далее, можно представить, что в процессе развития таких систем возникает возможность появления управления поведением всего множества {S1 , S2 , … , Sn }. Этот переход {Si } —> {Si } + C = S’ значительно сложнее, чем дубликация, именно он и есть «революционный» переход с нижнего уровня иерархии на верхний. После такого метасистемного перехода естественно возникают дополнительные возможности развития систем Si .
Заметим, что концепции блочно-модульной эволюции, блочно-модульных иерархических систем, сходные с идеями теории метасистемных переходов, высказываются и рядом специалистов в области молекулярной генетики. Например, блочно-модульный принцип организации и эволюции молекулярно-генетических систем управления обосновывается В.А. Ратнером [21,22]. Согласно этому принципу эволюция генов, РНК, белков, геномов и молекулярных систем управления на их основе шла путем комбинирования блоков (модулей) снизу доверху, причем модулями, из которых составлялись вновь возникающие молекулярно-генетические системы, служили уже функционирующие макромолекулярные компоненты.
Основные метасистемные переходы по В.Ф. Турчину состоят в следующем:
- управление положением = движение
- управление движением = раздражимость (простой рефлекс)
- управление раздражимостью = (сложный) рефлекс
- управление рефлексами = ассоциации (условный рефлекс)
- управление ассоциациями = человеческое мышление
- управление человеческим мышлением = культура
Характеризуя уровни эволюции биологических систем управления, В.Ф. Турчин обращает особое внимание на следующие особенности поведения животных:
- целенаправленность поведения,
- прогнозирование событий путем построения животным или человеком моделей внешней среды,
- формирование понятий,
- иерархичность систем управления.
В книге “Феномен науки” [13] В.Ф. Турчин также рассматривает процессы возникновения мышления человека, особенности представления информации в символьной форме, логической обработки символьной информации. В [13] характеризуется примитивное и критическое мышление, анализируются ступени развития математического знания, обсуждаются перспективы развития человечества и роль феномена науки в этом развитии.
Выше были представлены концептуальные проработки об эволюции когнитивных способностей животных, о формировании в процессе эволюции все более и более интеллектуальных систем управления поведением животных. Эти концепции очень важны, но что же сделано в области конкретного моделирования когнитивных свойств биологических организмов и эволюции когнитивных свойств. Общая ситуация примерно такова. Есть множество математических и компьютерных моделей, характеризующих «интеллектуальные» изобретения: модель возникновения безусловного рефлекса на молекулярно-генетическом уровне [23], модели привыкания [24], большое количество моделей условных рефлексов [24-29]. Однако эти модели очень фрагментарны, слабо разработаны и не формируют общую картину эволюционного происхождения мышления, логики, интеллекта.
Пока можно только говорить об определенном заделе в направлении теоретических исследований «интеллектуальных изобретений» биологической эволюции. Но этот задел активно развивается.
Сравнительно недавно, в конце 80-х — начале 90-х годов возникли два интересных, тесно связанных между собой направления кибернетических исследований: «Искусственная жизнь» (английское название Artificial Life или ALife) [30,31] и «Адаптивное поведение» (Adaptive Behavior) [24,32,33]. И в этих направлениях активно предпринимаются попытки промоделировать адаптивное поведение живых организмов и системы управления адаптивным поведением.
Основной мотивацией исследований искусственной жизни служит желание понять и промоделировать формальные принципы организации биологической жизни. Как сказал руководитель первой международной конференции по искусственной жизни К. Лангтон, “основное предположение искусственной жизни состоит в том, что “логическая форма” организма может быть отделена от материальной основы его конструкции”.
Большинство моделей искусственной жизни – остроумные компьютерные эксперименты. С примерами моделей искусственной жизни можно познакомиться по работе [16] (Лекции 12, 14). Работы по искусственной жизни очень интересны, и являются стимулом ряда важных прикладных работ в области мультиагентного моделирования, хотя часто в них есть налет некой «игрушечности» и легковесности.
По-видимому, более серьезное направление исследований – «Адаптивное поведение», в котором делается попытка моделирования адаптивного поведения животного и робота.
3. From Animal to Animat — моделирование адаптивного поведения животного и робота
С начала 90-х годов активно развивается направление «Адаптивное поведение» [24,32]. Основной подход этого направления – конструирование и исследование искусственных (в виде компьютерной программы или робота) «организмов», способных приспосабливаться к внешней среде. Эти организмы называются «аниматами». Термин «анимат» происходит от слов animal (животное) и robot:
ANIMAL + ROBOT = ANIMAT .
Поведение аниматов имитирует поведение животных. Исследователи направления «Адаптивное поведение» стараются строить такие модели, которые применимы к описанию поведения, как реального животного, так и искусственного анимата.
Программа-минимум направления «Адаптивное поведение» – исследовать архитектуры и принципы функционирования, которые позволяют животным или роботам жить и действовать в переменной внешней среде.
Программа-максимум этого направления – попытаться проанализировать эволюцию когнитивных способностей животных и эволюционное происхождение человеческого интеллекта [33].
Как и для «Искусственной жизни», для исследований «Адаптивного поведения» характерен синтетический подход: здесь конструируются архитектуры, обеспечивающие «интеллектуальное» поведение аниматов. Причем это конструирование проводится как бы с точки зрения инженера: исследователь сам «изобретает» архитектуры, подразумевая, конечно, что какие-то подобные структуры, обеспечивающие адаптивное поведение, должны быть у реальных животных.
Проиллюстрируем работы в области адаптивного поведения на примере исследований AnimatLab (http://www-poleia.lip6.fr/ANIMATLAB/), руководимой Жаном-Аркадием Мейером.
Общий подход этой лаборатории можно охарактеризовать следующим образом. Анимат (рис.5) существует в реальной или модельной среде. У него есть сенсоры, которые воспринимают информацию из внешней и внутренней среды анимата, и эффекторы, посредством которых он взаимодействует со средой, а также система управления, которая координирует восприятие и действия анимата. Поведение анимата считается адаптивным, если система управления поддерживает жизненно важные переменные анимата (например, V1 и V2 на рис.5) в допустимых пределах. На рис.5 штриховая стрелка показывает возможную траекторию, выходящую за пределы допустимой области (серый фон – недопустимая область переменных). Сплошная стрелка – показывает “исправленную” траекторию, откорректированную с помощью системы управления, обеспечивающей поддержание переменных в допустимой (светлой) области. Если система управления выбирает последовательные цели, которые анимат стремиться достичь, то о такой системе можно говорить как о мотивационной системе (motivational system). Система управления анимата может формироваться и модифицироваться путем обучения, индивидуального развития и эволюции.
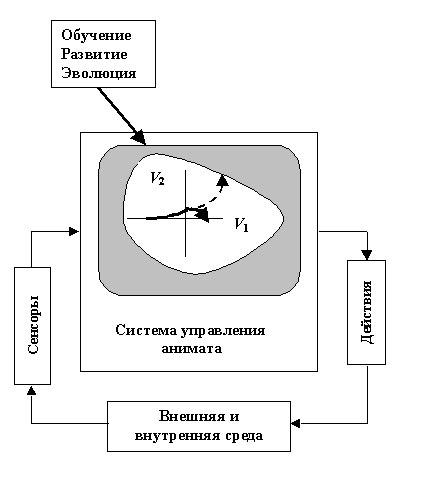
Рис. 5. Общая схема поведения анимата (подход AnimatLab).
Интересное направление исследований AnimatLab – конструирование и моделирование мотивационных систем управления аниматами.
Пример мотивационной системы – довольно интеллектуальная архитектура управления аниматом MonaLysa, который, функционируя в сложной среде, способен сам выделять цели и подцели адаптивного поведения. (MonaLysa – сокращение от MotivatiONAlLY autonomouS Animat) [33]. Основная идея данной системы управления состоит в том, что в процессе освоения внешнего мира и накопления опыта анимат стремится разбить задачу достижения глобальной цели на подзадачи, а затем использовать этот опыт при планировании решения новых задач.
В работе [33] исследовалось поведение анимата MonaLysa на примере навигационной задачи. Анимат помещался в центральную нижнюю точку прямоугольника, и нужно было попасть в центральную верхнюю точку (рис. 6), обходя различные препятствия. Анимат мог работать в «планирующем режиме», т.е., как сказано выше, разбивать задачи на подзадачи, и планировать свои действия в соответствии с уже имеющимся опытом. Это поведение сравнивалось с поведением в «реактивном режиме» – без плана, на основе только текущей видимой ситуации. Пример поведения анимата в «реактивном режиме» и «планирующем режиме» приведен на рис.6.
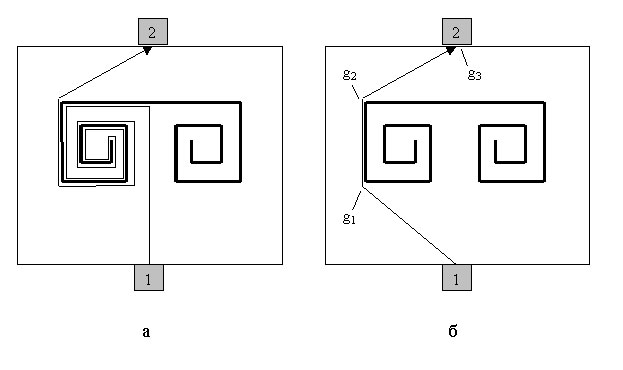
Рис. 6. Траектории движения анимата MonaLysa в реактивном (а) и планирующем (б) режиме работы системы управления [33]. 1 – исходное положение анимата, 2 – конечная цель движения анимата. Жирной линией показаны препятствия, которые должен обойти анимат, тонкой линией – путь анимата.
В «реактивном режиме» анимат знает, где расположена конечная цель, и если нет препятствия, то движется прямо к этой цели; натыкаясь на препятствие, он обходит его до тех пор, пока не появится снова возможность двигаться к прямо к цели. В «планирующем режиме» анимат на основании предшествующего опыта выделяет подцели (точки g1, g2, g3 на рис.6б), и движется прямо к текущей подцели, причем последняя подцель совпадает с конечной целью движения.
Отметим, что схема анимата MonaLysa была реализована как в компьютерной программе, так и для управления реальным роботом Khepera.
Системы управления аниматов используют либо нейронные сети, либо эвристические алгоритмы выбора действий и обучения, например, классифицирующие системы Дж. Холланда [34]. В частности, в анимате MonaLysa была использована простая версия классифицирующей системы.
Для справки охарактеризуем кратко классифицирующие системы. Классифицирующая система есть система индуктивного вывода, которая основана на использовании набора логических правил. Каждое правило имеет следующую форму: «если <условие>, тогда <действие>». Система правил оптимизируется как посредством обучения, так и эволюционным методом. В процессе обучения меняются приоритеты использования правил (т.е. меняются коэффициенты, характеризующие силу правил). При обучении используется так называемый алгоритм «пожарной бригады»: при успехе поощряются не только те правила, которые непосредственно привели к успешному действию, но и те, которые были предшественниками успеха. Поиск новых правил осуществляется эволюционным методом.
В работах AnimatLab была сделана интересная попытка промоделировать индивидуальное развитие, “онтогенез” нейронной сети анимата. Общая схема метода формирования нейронной сети состоит в следующем. Нейронная сеть искусственного организма (анимата) формируется с помощью специальной программы развития, контролирующей процесс конструирования сети. Эта программа имитирует развитие нейронной сети в процессе индивидуального взросления организма. Сама программа развития оптимизируется с помощью эволюционного алгоритма. Нейронная сеть формируется в двумерной ограниченной области. Программа развития состоит из инструкций (команд), которые определяют процессы возникновения новых нейронов (или исчезновения уже имеющихся нейронов) в этой области, формирование связей между нейронами и задание весов синаптических связей между нейронами. Инструкции программы составляют геном анимата. Работа формирующихся нейронных сетей оценивается по поведению анимата некоторой естественной функцией приспособленности, которая определяет отбор наиболее эффективных программ развития, кодируемых геномами аниматов. Описание этого метода содержится в обзоре [35] соответствующего цикла работ AnimatLab.
Некоторые дополнительные сведения о работах в области “Адаптивного поведения” можно почерпнуть из Лекции 13 в [16] и из аннотаций статей, опубликованных в журнале “Adaptive Behavior” в 1990-98 гг.
Подчеркнем, что в “Адаптивном поведении”, как и в “Искусственной жизни”, в основном используется феноменологический подход к исследованиям систем управления адаптивным поведением. Т.е. предполагается, что существуют формальные правила адаптивного поведения, и эти правила не обязательно связаны с конкретными микроскопическими нейронными или молекулярными структурами, которые есть у живых организмов. Скорее всего, такой феноменологический подход для исследований адаптивного вполне имеет право на существование. В пользу этого тезиса приведем аналогию из физики. Есть термодинамика, и есть статистическая физика. Термодинамика описывает явления на феноменологическом уровне, статистическая физика характеризует те же явления на микроскопическом уровне. В физике термодинамическое и стат-физическое описания относительно независимы друг от друга, и вместе с тем, взаимодополнительны. По-видимому, и для описания живых организмов может быть аналогичное соотношение феноменологическим (на уровне поведения) и микроскопическим (на уровне нейронов и молекул) подходами. При этом, естественно ожидать, что для исследования систем управления адаптивным поведением феноменологический подход должен быть более эффективен.
4. Интеллектуальное управление и проблема Всемирного мозга
Что такое всемирный мозг
Термин “всемирный мозг” появился недавно и характеризует активно развивающиеся интеллектуальные Интернет-системы. Здесь мы не будем анализировать различные определения всемирного мозга, а остановимся на одном, достаточно продуманном определении, которое дает профессор Френсис Хейлигхен (Свободный университет Брюсселя).
“»Всемирный мозг» – это метафорическое название возникающей интеллектуальной сети, формируемой человечеством на основе использования компьютеров, баз знаний и связей, которые объединяют все это в единое целое. Эта сеть представляет собой сложную, самоорганизующуюся систему, которая не только обрабатывает информацию, но и постепенно приобретает функции, сходные с функциями мозга: принятие решений, решение проблем, обучение, формирование новых соединений и открытие новых идей” [36] .
Ядро разработки технологии всемирного мозга – системы искусственного интеллекта (ИИ) в Интернете. Отметим некоторые примеры работ, которые можно отнести к таким разработкам:
Интеллектуальные системы поиска нужной информации в Интернете, разрабатываемые фирмой НейрОК (С.А. Шумский, Москва, С.А. Терехов, Снежинск). Эти системы используют нейросетевые и эволюционные алгоритмы обработки семантической информации и позволяют естественным образом кластеризовать понятия, встречающиеся в Интернете, причем такая кластеризация автоматически адаптируется к пользователю системы.
Разработки фирмы Webmind, ориентированные на создание ряда конкретных систем ИИ, специально предназначенных для работы в Интернет-среде: анализ состояния финансовых систем, прогноз экономических индексов, анализ политических систем, интеллектуальный поиск нужной информации в Интернете (аналогично фирме НейрОК) и объединение таких конкретных систем в симбиотический Интернет-интеллект [37, 38, 39] (Б. Гертзель, США). При этом делается попытка найти свой путь в ИИ – средний между обычным символьным ИИ и нейросетевым коннекционистским подходом к ИИ.
Итак, всемирный мозг – это возникающая технология на стыке Интернета и искусственного интеллекта.
Почему работы по всемирному мозгу будут заведомо развиваться
Эти работы связаны с экономикой и социальным развитием человеческого сообщества. Интернет позволяет оперативно производить поиск нужной информации. Но для использования этой информации в экономических, социальных, экологических и политических системах необходимо эффективно и умно ее обрабатывать. Более того, активно развивается Интернет-экономика, для которой явно необходим оперативный анализ больших массивов информации, которые трудно обработать человеку. Поэтому заведомо нужно создание Интернет-специфичных интеллектуальных систем обработки информации.
Такие системы могли быть полезными на разных уровнях управления – на уровне фирмы, на уровне района, города, региона, государства, человечества.
Здесь попробуем немного пофантазировать.
Например, можно представить себе Интернет-систему управления сельским районом, в котором информация об экономических и социальных структурах, а также об экологии района оперативно собирается и обрабатывается. На основе этой информации интеллектуальная экспертная система предлагает администрации района возможные решения и прогнозы результатов различных решений. Окончательные решения, конечно же, принимаются человеком, а экспертная система играет роль интеллектуального помощника.
Можно также представить формирование распределенного университета с Интернет-обучением в той же сельской местности. И одна из задач, которую могли бы решать затем выпускники этого университета – разработка указанных интеллектуальных экспертных системы с учетом специфики региона.
В результате в таком регионе высшее образование вполне может быть получено и эффективно применено в провинции со всеми положительными экономическими, социальными и экологическими последствиями.
Пример другого уровня – система управления фирмой, для которой интеллектуальные Интернет-агенты (например, популяция агентов, самооптимизирующаяся эволюционным путем) проводят поиск надежных бизнес-партнеров по информации, представленной в Интернете.